
Everything that we do and know about, takes place in three-dimensional space. To best describe the way in which objects move through this space requires an understanding of “degrees of freedom”. Most people are familiar with an X-Y plane, which describes an infinite, flat space. Since any point on that plane can be placed at an exact location, merely by describing that location with two numbers, it is said to have two degrees of freedom.
If we add another axis, called the Z axis, any location in this space can be described by a three number sequence. This is known as having three degrees of freedom. In this description, an object can move from one location to another by sliding along each axis. To represent the position (3,-2, 5), you would move three steps in the +X direction, then two steps in the -Y direction and finally five steps in the +Z direction.
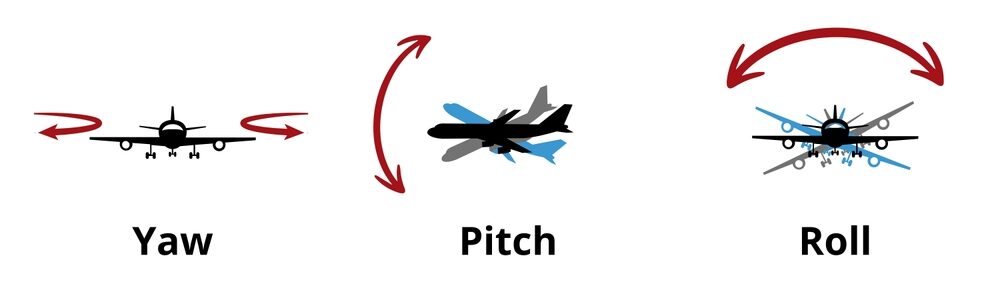
Though this is useful for solving math problems, it misses the real world of movement through space which includes rotational movement of objects. A useful model is to imagine a plane in the air. Obviously, the plane can move up-down, left-right, and forward-backward. These are the three degrees of freedom we first introduced to describe the plane’s position in the three-dimensional space of the atmosphere. However, the plane can also rotate along three axes. To describe those motions, we introduce three additional degrees of freedom. Rolling left-right around an imaginary line aligned with the plane’s forward motion is call “roll”. Swaying left-right is called yaw and the up-down movement of the nose is known as pitch. Describing these six degrees of freedom can completely describe the movement of an object moving through space.
All objects have the potential to move in all six degrees of freedom (DOF):, ships, drones, robots, machinery, even the human body. One easy self-demonstration is to make a fist with your dominant hand and prove to yourself that you can move your hand forward/back, side/side, and up/down. Then you can move it further in roll, pitch and yaw. This should start to give you a sense of the complexity required to imitate human motions with a robot. If you include all finger movements, plus the thumb and the wrist, there are a total of 39 degrees of freedom in the human hand/wrist alone.